超级有弹性的蠕虫状机器人能够感受周围环境
科学家们说,能够“感受”周围环境的超弹性蠕虫状机器人可以在工业和假肢中找到应用。格拉斯哥大学的一个工程师团队开发了一种机器人,其运动形式受到蚱蜢和蚯蚓运动的启发。
柔软、摆动的机器虫可以伸展到自身长度的九倍,并且能够进行一种本体感受——蠕虫等生物体感知它们在空间中的位置的方法。这种能力之前在软机器人领域没有得到证明,它允许机器人蠕虫挤入传统刚性机器人无法到达的狭窄位置。
研究人员希望他们的突破能够产生能够自主探索难以到达的地方的新一代机器人。他们可以在采矿、建筑甚至救灾中找到应用,以寻找被困在瓦砾中的幸存者。
他们的技术还可用于开发更逼真的假肢,或为机器人配备环绕和提起不规则形状重物的能力。
该开发建立在格拉斯哥大学可弯曲电子和传感技术(BEST)小组之前的研究的基础上,该小组已经找到了将柔性电子嵌入可变形表面的新方法。
这种专业知识使他们能够在蠕虫状机器人中构建内在应变传感器,该机器人长约4.5厘米。它们覆盖着由称为Ecoflex的弹性塑料和团队开发的石墨糊制成的“皮肤”。
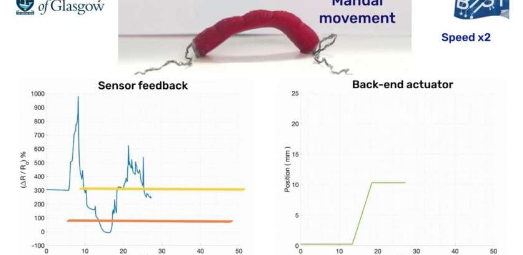
连接在机器人管状体两端的微型永磁体有助于它们沿着金属表面移动。他们皮肤中的传感器通过测量石墨糊的电阻来帮助他们“感知”与身体相关的运动,石墨糊的电阻随着机器人身体的膨胀而变化。当阻力达到预设的最大值时,身体再次收缩,向前移动。
格拉斯哥大学詹姆斯瓦特工程学院的RavinderDahiya教授领导了开发该系统的BEST小组。
Dahiya教授说:“本体感觉是许多生物生命形式的重要特征,长期以来,科学家一直受到启发,试图开发模仿这种能力的工程系统。
“我们的仿生机器人是朝着创造柔软、灵活的机器人系统迈出的一步,该系统能够实现大自然在蛲虫和蚯蚓中创造的无限运动方向。
“像这样的软机器人通过无缝嵌入的可拉伸传感器适应周围环境的能力可以帮助自主机器人更有效地在最具挑战性的环境中导航。”
标签: