机器人导盲犬用皮带引导的混合物理交互引导人类
2021-09-16 14:45:17
•
来源:
导读 导盲犬在帮助视力受损或虚弱的人导航方面具有巨大的好处。可以模仿这个例子设计一个自主机器人。然而,目前大多数引导机器人都是用刚性手臂
导盲犬在帮助视力受损或虚弱的人导航方面具有巨大的好处。可以模仿这个例子设计一个自主机器人。然而,目前大多数引导机器人都是用刚性手臂引导人类,这使得操作变得困难和复杂。使用皮带可以解决问题。
因此,最近的一篇论文介绍了一种新颖的混合物理人机交互框架,以使用带睫毛的机器人导盲犬进行导航。该模型捕捉了机器人-皮带-人类系统中的动态关系。它规划在导航到目标位置期间避开障碍物的路径,并考虑皮带的拉紧和松弛状态。
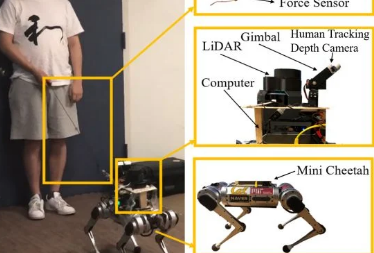
一种名为MiniCheetah的机器人可以在狭窄的环境中以无碰撞轨迹成功导航,同时通过利用混合模式开关引导盲人。实验视频可在此处获得。
能够在狭窄杂乱的空间中物理引导人类的自主机器人对于视障人士来说可能是一个巨大的福音。大多数现有机器人引导系统基于具有大底座的轮式平台,该平台带有致动的刚性引导手杖。大底座和驱动臂限制了这些现有方法在狭窄和杂乱的环境中运行。我们提出了一种方法,该方法引入带有皮带的四足机器人,使机器人引导的人类系统能够改变其内在尺寸(通过让皮带松弛)以适应狭窄的空间。我们提出了一种混合物理人机交互模型,该模型涉及皮带张力来描述机器人引导人类系统中的动态关系。该混合模型用于混合整数编程问题,以开发反应式规划器,该规划器能够利用松弛-拉紧切换来引导蒙眼的人在密闭空间中安全旅行。所提出的皮带引导机器人框架部署在迷你猎豹四足机器人上,并在实验中得到验证。
标签:
郑重声明:本文版权归原作者所有,转载文章仅为传播更多信息之目的,如有侵权行为,请第一时间联系我们修改或删除,多谢。