使用镜面反射减少遮挡的机器人视觉系统
为了安全、最有效地在周围环境中导航,机器人应该得到高性能计算机视觉系统的支持。为机器人开发计算机视觉系统时面临的最大挑战之一是限制遮挡,以便机器人可以感知大部分环境。
东芝公司的研究人员最近开发了一种机器人 视觉系统,可以减少机器人视觉系统中的遮挡。该系统在 arXiv 上预先发表的一篇论文中提出,使用倾斜镜来增加机器人传感器覆盖的空间。
“遮挡是机器人视觉系统的一大挑战,”进行这项研究的研究人员之一吉冈健太郎告诉Tech Xplore。“遮挡可能会导致机器人感知错误,导致忽视或更糟,甚至损坏机器人或物体。”
到目前为止,研究人员已经设计了两种主要方法来减少机器人视觉系统中的遮挡。第一个是基于在机器人正在探索的环境中安装更多的传感器或摄像头,第二个是将传感器直接集成到移动机器人上。虽然这些方法可以减少遮挡,但它们都有很大的局限性。
“减少机器人视觉系统遮挡的一种方法是在工作场所安装多个传感器,”Yoshioka 说。“虽然这是一种简单的方法,但它可以有效地减少遮挡而不影响机器人。但是,这种方法显着增加了传感器成本。或者,我们也可以将传感器安装到机器人本身上,并通过操纵机器人从多个角度进行感知来减少遮挡。”虽然传感器成本可以降低,但这会损害机器人的工作效率。”
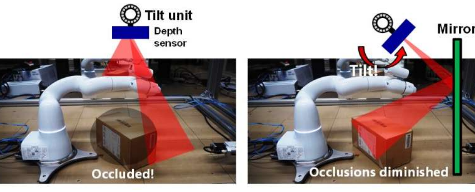
为了消除机器人视觉系统的遮挡,Yoshioka 和他的同事提出了一种新机制,可以将传感器倾斜以面向镜子,然后检索镜子上反射的环境图像。尽管其他研究通过镜面反射对 3D 传感进行了试验,但这组研究人员是最早利用这种技术来减少或消除机器人视觉系统中的遮挡的研究人员之一。
“我们的系统通过从通常的天顶传感器(称为直接感应)进行感应并从直接感应结果中检测遮挡来工作,”Yoshioka 解释说。“我们以最佳倾斜角设置倾斜传感器,以便我们可以通过反射感应有效地消除遮挡。”
Yoshioka 和他的同事提出的新机器人视觉方法与现有系统相比有几个优点。首先,它可以使用廉价的镜子和倾斜单元来实现,因此可以节省购买多个昂贵的 3D 传感器的成本。此外,传感器执行的倾斜运动是一种简单的单轴运动,其执行速度比带有集成传感器的机器人移动四肢以感知周围环境的其他部分要快得多。
“我们的系统从即时的直接传感结果中检测场景中的遮挡,并使用遮挡区域坐标计算最佳倾斜角,”Yoshioka 说。“因此,即使场景中的机器人四处移动,我们的系统也不需要重新编程,它可以自适应地减少遮挡。”
Yoshioka 和他的同事在一系列实验中使用 COBOTTA 对他们的系统进行了评估,COBOTTA 是一种由丰田旗下的公司 DENSO 开发的机械臂。他们发现,与直接传感系统相比,他们的系统显着提高了准确性。值得注意的是,该团队能够实现与采用两个 3D 传感器的机器人传感系统相同的检测精度。
未来,本文中提出的新方法可用于提高现有和新兴机器人系统的性能、移动性和导航能力。同时,Yoshioka 和他的同事计划探索进一步提高系统性能的方法。
“到目前为止,我们的系统只使用了一个镜像,”Yoshioka 说。“将其扩展到多镜子设置将是我们未来研究的方向。通过添加更多镜子,我们可以使系统适应更具挑战性的案例场景和环境(例如,多机器人设置)。”
吉冈最近离开了东芝。此处表达的所有意见均为他本人的意见,不代表本公司的观点或意见。
标签: