BioBot技术在协助人类方面得到了检验
威尔纳·戈麦斯·维亚纳13岁时,父亲带他去了家乡巴西的一所技术学校。作为参观的一部分,年轻的维亚纳路过学生们玩着一个简单构造的机械臂,抓住儿童的形状分类块并将它们放入相应的孔中。就在那时,他知道他想进入机器人领域。
现在,Viana是佛罗里达理工学院的一名电气工程专业大四学生,她正致力于利用机器人技术进一步帮助人类完成困难或不安全的任务。
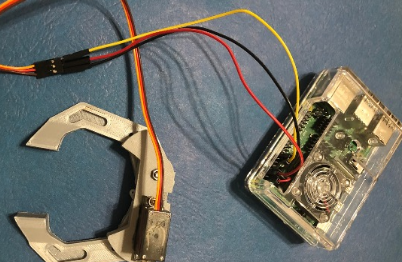
Viana和他的团队由学生研究人员JackCrawford和AndrewNeal组成,他们开发了BioBot项目,这是一个机器人系统,传感器连接到人类操作员的手臂和手上,用于控制机器人爪。BioBot项目将成为Viana高级设计项目的一部分,其目的是利用肌肉组织驱动机械手。在处理涉及机器人技术的任务时,BioBot还将允许更好的控制,并且在未来,在有毒或其他不安全的环境中可能特别有用。
该团队使用了数字信号处理器、机械手和肌电图(EMG)传感器,用于测量肌肉运动产生的小电信号。BioBot数字过程旨在实现最佳可访问性,传感器放置在人类手臂和手部的关键时刻,以更好地模拟打开和关闭物体时激活肌肉的运动。通过研究以前作品的电压电平信号,Viana能够更好地理解如何模拟人臂和机器人手臂之间的力学。
“我们有一个线性方程,根据信号的电压水平,爪将移动到那个特定的位置,”维亚纳说。“所以我们可以控制我们在爪子中挤压的力量。”
BioBot是在VetonKepuska领导的计算机系统课程中开发的。它的灵感来自于他在LeeCaraway领导的高级设计项目中的工作,他们正在研究协作机器人(Cobot)。与传统的工业机器人不同,协作机器人旨在在共享空间内或附近进行直接的人机交互。协作机器人通常从事检查和拣选等任务。根据Statista的数据,从2017年到2020年,每年安装的协作机器人数量都在增长,到2020年,全球安装的协作机器人数量约为22,000台。
虽然BioBot项目存在诸如固定部件等挑战,但最大的挑战是时间。现年30岁的Viana从事工程师工作12年,最初在巴西为一家国际公司工作,后移居并调到墨尔本的一家公司分公司。在完成学业之前拥有一份职业也对Viana有所帮助,因为他能够更好地管理和分割他必须做的所有工作,以及从哪里开始项目。
“我和(我的队友)杰克,我们花了很多晚上去喜欢午夜,凌晨1点吃披萨,并在系统上工作以确保一切正常。我觉得这是一个挑战,但它也是在玩技术,这是我、杰克和安德鲁真正喜欢做的事情。”
未来,Viana和他的团队希望将BioBot技术与他们的协作机器人集成。Viana讨论了在遥远区域(例如恶劣环境)中使用传感器控制整个手臂的可能性。该技术可以用作假肢,允许四肢运动。
维亚纳仍然记得那个穿过那所技术学校的小孩,迷恋于他对机器人的新发现。通过他的BioBot开发,他自己可能会对机器人技术产生重大影响。
“小时候,我对机器人技术感到非常惊讶。这对我来说真的很酷,”他说。
标签: