操纵杆操作的机器人可以帮助外科医生远程治疗中风
麻省理工学院的工程师开发了一种远程机器人系统,以帮助外科医生快速远程治疗中风或动脉瘤患者。使用经过改进的操纵杆,一家医院的外科医生可以控制另一个位置的机械臂,以便在可以挽救患者生命并保护其大脑功能的关键时间窗口内安全地对患者进行手术。
该机器人系统的运动由磁铁控制,旨在远程协助血管内介入治疗——这是一种在紧急情况下进行的治疗血栓引起的中风的手术。这种干预通常需要外科医生手动将细线引导至凝块,在那里它可以物理清除阻塞或输送药物以将其分解。
此类程序的一个限制是可及性:神经血管外科医生通常驻扎在偏远地区的患者难以接触到的主要医疗机构,尤其是在“黄金时间”——中风发作后的关键时期,在此期间应该进行治疗以尽量减少对大脑的任何伤害。
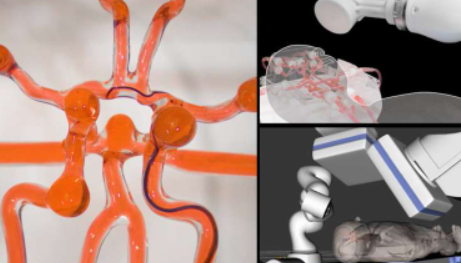
麻省理工学院团队设想其机器人系统可以安装在小型医院,并由大型医疗中心的训练有素的外科医生进行远程指导。该系统包括一个医疗级机械臂,其手腕上附有一块磁铁。使用操纵杆和实时成像,操作员可以调整磁铁的方向并操纵手臂以引导软而细的磁线穿过动脉和血管。
研究人员在“幻影”中展示了该系统,这是一种透明模型,血管复制大脑的复杂动脉。只需一个小时的培训,神经外科医生就能够远程控制机器人的手臂,引导电线穿过迷宫般的血管,到达模型中的目标位置。
“我们想象,与其将病人从农村地区运送到大城市,他们可以去当地医院,在那里护士可以建立这个系统。主要医疗中心的神经外科医生可以观看病人的实时成像并使用麻省理工学院机械工程和土木与环境工程教授赵宣和说。
赵和他的团队今天在ScienceRobotics上发表了他们的发现。麻省理工学院的合著者包括主要作者YoonhoKim、EmilyGenevriere和JaehunChoe,以及马萨诸塞州总医院(MGH)的PabloHarker、RobertRegenhardt、JustinVranic、AdamDmytriw和AmanPatel,以及飞利浦北美研究中心的MarcinBalicki.
倾斜和扭转
血管内手术是一种专门的微创手术,包括小心地扭转和引导细医疗线穿过身体的动脉和血管到达目标位置,以避免损坏血管壁。该程序通常需要外科医生多年的培训才能掌握。
正在探索机器人系统作为血管内手术的辅助技术。这些系统主要涉及电机驱动器,该驱动器在通过人体脉管系统扭转导线的同时推进和缩回导线。
麻省理工学院团队设想其机器人系统可以安装在小型医院,并由大型医疗中心的训练有素的外科医生进行远程指导。学分:麻省理工学院
“但是,拥有与[作为外科医生]相同水平的机器人扭曲是具有挑战性的,”Kim指出。“我们的系统基于一种根本不同的机制。”
该团队的新系统建立在2019年的工作基础上,他们展示了通过真人大小的大脑血管硅胶模型操纵磁控线。他们当时使用了一个手持磁铁,大约有汤罐那么大,他们手动操作。
此后,他们将磁铁固定在医疗级机械臂的末端,可以使用鼠标上的小操纵杆旋钮进行操纵。通过倾斜操纵杆,研究人员可以将磁铁倾斜到磁线可以跟随的方向。鼠标上的按钮控制一组电动线性驱动器,它们可以推进和缩回电线以使其前后移动。
该导线与传统的神经血管导丝一样细而柔韧,具有柔软的磁性响应尖端,该尖端跟随并沿磁场方向弯曲。
寻找路径
该团队在MGH的导管实验室测试了机器人系统——这是一个手术室,配备了用于血管内手术的标准医学成像设备。研究人员在实验室中安装了机械臂,以及真人大小的硅胶血管模型。他们将操纵杆以及显示模型实时视频的监视器放在控制室中。从那里,操作员一边观看视频,一边使用操纵杆远程控制电线穿过船只。
该团队训练了一组神经外科医生使用机器人系统。经过一小时的培训,每位外科医生都能够成功地操作该系统,将导丝引导通过手动导丝难以导航的复杂血管。
该团队还使用机器人系统清除模型中难以到达的区域中的模拟凝块。他们引导导丝穿过血管,绕过尖角和转弯,到达研究人员模拟凝块的区域。一旦他们将导丝引导至凝块,外科医生就会采用标准的血管内方法将微导管沿着导丝穿入凝块部位。他们收回了导线,留下了导管,然后他们将导管成功去除了凝块。
“磁导丝的主要目的是快速、安全地到达目标位置,以便可以使用微导管等标准设备进行治疗,”Kim说。“我们的系统就像一个探路者。”
他希望远程操作系统可以帮助更多的患者接受时间紧迫的治疗。他还看到了外科医生的好处,他们通常与患者在同一个房间内进行此类血管手术,同时暴露于X射线成像的辐射下。
“神经外科医生可以在另一个房间甚至另一个城市操作机器人,而无需反复暴露在X射线下,”赵说。“我们对这项技术对全球健康的潜在影响感到非常兴奋,因为中风是导致死亡和长期残疾的主要原因之一。”
标签: