了解有效使用机器人工具的物理效应
2022-07-04 17:14:29
•
来源:
导读 机器人可以通过使用工具并根据具体情况调整其选择来扩展其能力。然而,目前的机器人机器离产生情境工具使用策略还很远。arXiv org最近的一
机器人可以通过使用工具并根据具体情况调整其选择来扩展其能力。然而,目前的机器人机器离产生情境工具使用策略还很远。arXiv.org最近的一篇论文提出了一个综合学习和规划框架,其中机器人通过推理有助于任务成功的基本物理特性来理解和产生有效的工具使用策略。
该框架侧重于工具产生的物理效应,并学会识别完成任务的基本物理特性。然后,生成各种工具使用策略,其效率通过共同努力来评估。
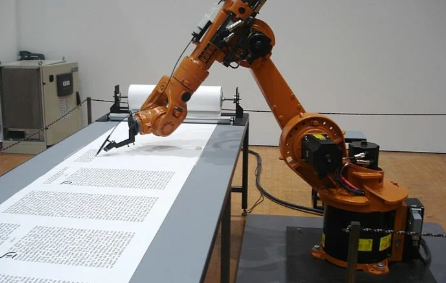
研究人员在两个机器人任务中展示了该框架的能力:破解核桃和切胡萝卜。它可以识别对任务成功具有重要意义的物理特性,并使用可见和不可见的对象作为工具来制定有效的工具使用策略。
我们提出了一个机器人学习和规划框架,以最少的联合努力产生有效的工具使用策略,能够处理不同于训练的对象。利用基于有限元方法(FEM)的模拟器,该模拟器在给定观察到的工具使用事件的情况下再现细粒度、连续的视觉和物理效果,通过建议的迭代深化符号回归(IDSR)算法识别导致效果的基本物理属性.我们进一步设计了一种基于最佳控制的运动规划方案,以整合机器人和工具特定的运动学和动力学,以产生有效的轨迹来体现学习的特性。在模拟中,我们证明了所提出的框架可以产生更有效的工具使用策略,
标签:
郑重声明:本文版权归原作者所有,转载文章仅为传播更多信息之目的,如有侵权行为,请第一时间联系我们修改或删除,多谢。