用于生物医学应用的灵活的杆驱动软机器人
能够高效、准确和精确地完成任务的软机器人可以有许多有价值的应用。例如,它们可以被引入医疗环境,帮助医生进行复杂的外科手术或在康复期间帮助老年和弱势患者。
软机器人更灵活,可以变形更多。这可以提高灵活性(即完成任务时更好的手动技能),以及减少有效载荷(即机器人承载负载的能力),因为它们可以产生比刚性机器人系统更小的力
新加坡国立大学和北京交通大学的研究人员最近开发了一种新的杆驱动软机器人(RDSR),该机器人通过推拉动作进行操作。该机器人发表在IEEE Robotics and Automation Letters上的一篇论文中,结合了研究小组成员先前创建的两个机器人系统的机制。
进行这项研究的研究人员之一塞西莉亚·拉斯基 (Cecilia Laschi) 告诉 TechXplore:“在灵巧性、准确性和有效载荷方面的平衡性能可能在软机器人应用中具有巨大潜力。” “许多研究都集中在这一领域,一些工作和以前的成就启发了我们。例如,在《材料科学与工程》上发表的一项开创性研究中,我们开发了一种受章鱼启发的软机器人,由纵向和横向肌腱驱动,类似地章鱼的肌肉。”
Laschi 和她在 Scuola Superiore Sant'Anna 生物机器人研究所的同事创造的之前的机器人可以通过拉长、缩短和弯曲触手来模仿章鱼的移动方式。他们新开发的系统对于在密闭空间内完成任务特别有希望,例如清洁或探索、进入深腔和干预人体内部。
“启发我们最近工作的第二项研究是我的研究团队开发了一种基于推拉柔性杆的连续机器人,”另一位参与该研究的研究员王培仪解释说。“通过结合我们的章鱼启发系统的纯软体和王机器人的杆驱动臂,我们的新机器人旨在实现运动精度、工作空间、自由度、刚度和主动输出力的平衡性能。”
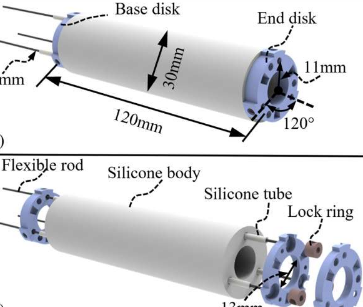
Laschi、Wang 和他们的同事创造的新机器人由一个硅胶软体、一个刚性底座、端盘和三个硅管组成,每个硅管都装有一个基于镍钛合金 (NiTi) 的柔性杆。集成在底座和端盘之间的硅体非常柔软和有弹性,因此可以很容易地拉长、缩短和弯曲。
“我们系统的每个柔性杆都可以在推动和拉动方向上进行控制,这与只有拉动作用的肌腱不同,”王说。“然后,通过三个推拉杆的协调控制,杆驱动软机器人(RDSR)可以实现任意方向的多次运动(多个自由度)。”
研究人员在一系列测试中评估了他们的 RDSR,将其性能与基于硅的肌腱驱动软机器人 (TDSR) 的性能进行了比较。他们发现他们的新机器人系统更坚固,可以在更广阔的工作空间内运行(从 2.6 倍扩大到 5.2 倍)。
与他们比较的 TDSR 相比,他们的机器人可以主动将垂直推力施加到倾斜平面上,还可以完成涉及对象操纵的任务。综合起来,所有这些发现表明,新机器人可以更有效地完成需要在更大空间内以高精度拾取和放置物体的任务。
“通过双向推拉驱动获得的运动是原创的,”Laschi 说。“它为软机器人提供了更准确的控制。我们工作的一个显着影响是它有可能在灵巧性、准确性和有效载荷方面实现平衡性能。”
未来,这组研究人员创建的新 RDSR 系统可以帮助更有效、更可靠地处理复杂的任务,实现更高的精度。在接下来的研究中,Laschi 和她的同事希望测试机器人在生物医学应用中的有效性,包括手术、康复和老年护理。
“我们还计划在其他方面改进我们创建的软臂,这些方面与其设计和力学不严格相关,但与其运动的控制有关,”Laschi 补充道。“添加和建模分布式本体感觉,即对手臂自身姿势的感知,是一个需要解决的挑战,以及用于检测接触力的强大传感系统。”
标签: