客观评价机器人和人脸的机械表现力
大阪大学工程研究生院的一位科学家提出了一种数值尺度来量化机器人机器人面部的表现力。通过关注面部的变形范围而不是机械执行器的数量,新系统可以更准确地测量机器人能够模仿实际人类情绪的程度。这项发表在AdvancedRobotics上的工作可能有助于开发更逼真的机器人,可以快速传达信息。
想象一下,在您下次去商场旅行时,您前往问讯处询问前往新商店的路线。但是,令您惊讶的是,一个机器人正在为办公桌配备人员。尽管听起来像科幻小说,但这种情况在未来可能不会太远。然而,实现这一目标的一个障碍是缺乏衡量安卓人脸表现力的标准方法。如果该索引可以平等地应用于人类和机器人,那将特别有用。
现在,大阪大学提出了一种新的评估方法来精确测量机器人机器人面部的机械性能。尽管面部表情对于在社交互动中传递信息很重要,但机械致动器再现人类情感的程度可能会有很大差异。
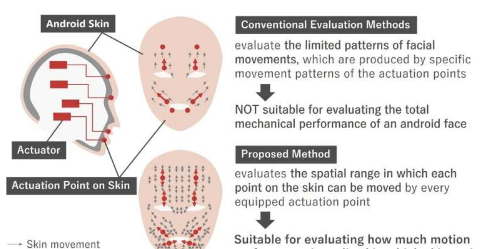
“我们的目标是了解如何将机器人的脸与人类进行比较,”作者HisashiIshihara说。虽然以前的评估方法只关注特定的协调面部动作,但新方法采用每个皮肤部分可以移动的空间范围作为“表现力”的数字指标。也就是说,新指数不是计算可以由控制运动的机械执行器创建的面部模式的数量或评估这些模式的质量,而是着眼于面部每个点可访问的总空间运动范围.
在这项研究中,分析了两个机器人——一个代表一个孩子,一个代表一个成年女性——以及三个人类成年男性。使用光学运动捕捉系统测量每个受试者超过100个面部点的位移。结果发现,机器人的表现力明显低于人类,尤其是在面部的下部区域。事实上,即使在最宽松的评估中,机器人的潜在运动范围也只有人类的20%左右。
“这种方法有望帮助开发具有与人类能力相媲美的表达能力的机器人,”石原说。未来对这种评估方法的研究可能会帮助安卓开发者创造出表现力更强的机器人。
标签: