抓握力适中的软机器人
长期以来,工具的使用一直是人类智能的标志,也是大量机器人应用需要解决的实际问题。但是机器在施加恰到好处的力来控制没有严格固定在他们手上的工具方面仍然很不稳定。
为了更稳健地操作上述工具,麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究人员与丰田研究所(TRI)合作,设计了一个系统,该系统可以抓住工具并为给定任务施加适当的力量,就像用笔挤液体或写一个字一样。
该系统被称为系列弹性末端执行器或SEED,它使用软气泡夹具和嵌入式摄像头来绘制夹具如何在六维空间内变形(想想安全气囊的充气和放气)并向工具施加力。使用六个自由度,物体可以左右、上下、前后、滚动、俯仰和偏航。闭环控制器(一种无需人工干预即可保持所需状态的自我调节系统)使用SEED和视觉触觉反馈来调整机器人手臂的位置,以施加所需的力。
例如,对于在桌子高度不确定时使用工具的人来说,这可能很有用,因为预编程的轨迹可能会完全错过桌子。“在我们所谓的混合力位置控制器上,我们一直非常依赖Mason、Raibert和Craig的工作,”博士HyungJuSuh说。麻省理工学院电气工程和计算机科学专业的学生,CSAIL附属机构,以及有关SEED的新论文的主要作者。“这就是想法,如果你在黑板上写字时实际上有三个维度可以移动,你希望能够控制一些轴上的位置,同时控制另一个轴上的力。”
刚体机器人及其对应物只能带我们到此为止;柔软性和柔顺性提供了奢华和变形能力,以感知工具和手之间的相互作用。
借助SEED,机器人感知到的每次执行都是来自抓手的最新3D图像,从而实时跟踪抓手如何改变物体周围的形状。这些图像用于重建工具的位置,机器人使用学习模型将工具的位置映射到测量的力。学习模型是使用机器人以前的经验获得的,它会干扰力扭矩传感器以计算出气泡夹的硬度。现在,一旦机器人感应到了力,它会将其与用户命令的力进行比较,并且可能会对自己说,“原来我现在感觉到的力并不存在。我需要按下更难。”然后它会朝着增加力的方向移动,所有这些都是在6D空间上完成的。
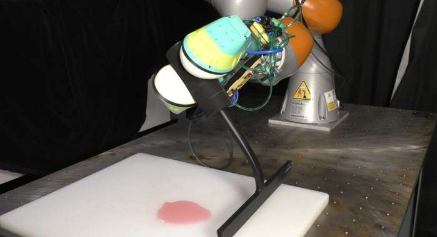
在“刮刀任务”期间,SEED被提供了适量的力来擦拭飞机上的一些液体,而基线方法难以获得正确的扫描。当被要求用纸笔书写时,机器人有效地写出了“MIT”,它还能够施加适量的力来驱动螺丝。
虽然SEED知道它需要控制给定任务的力或扭矩,但如果抓得太紧,物品将不可避免地滑落,因此施加的硬度有上限。此外,如果你是一个僵硬的机器人,你可以模拟比你的自然机械刚度更软的系统——但反之则不行。
目前,该系统为工具假设了一个非常特定的几何形状:它必须是圆柱形的,当它遇到新的形状时,它如何泛化仍然存在许多限制。即将进行的工作可能涉及将框架推广到不同的形状,以便它可以处理野外的任意工具。
“没有人会惊讶于顺从性可以帮助工具,或者力感应是一个好主意;这里的问题是机器人的顺从性应该去哪里以及它应该有多柔软,”论文合著者RussTedrake说,麻省理工学院电气工程和计算机科学、航空航天和机械工程教授,CSAIL首席研究员。“在这里,我们探索了在手/工具界面直接调节非常柔软的六自由度刚度,并表明这样做有一些很好的优势。”
标签: