这个独特的挖洞机器人的灵感来自太平洋鼹鼠蟹
谦逊的太平洋鼹鼠蟹(Emeritaanaloga)即将掀起波澜。加州大学伯克利分校的研究人员推出了一种独特的机器人,其灵感来自这种穴居甲壳类动物,有朝一日它可能有助于评估农业场地的土壤、收集海洋数据并研究建筑工地的土壤和岩石状况。
在10月10日发表在《机器人与人工智能前沿》上的一项研究中,机械工程助理教授HannahStuart和她的团队展示了首批可以垂直自我挖掘的腿式机器人之一。这款挖掘机器人名为EMBUR(EMeritaBUrrowingRobot),采用新颖的腿部设计实现向下运动,模仿太平洋鼹鼠将自己埋在沙滩沙子中的方式。
鼹鼠蟹让挖洞看起来很容易,但据该研究的主要作者、博士劳拉·特里尔斯(LauraTreers)说。在Stuart的EmbodiedDexterity研究小组攻读机械工程专业的学生,很难通过沙子和土壤等颗粒状介质向下移动。动物挖掘得越深,谷物就越难以推回,从而阻碍挖掘。
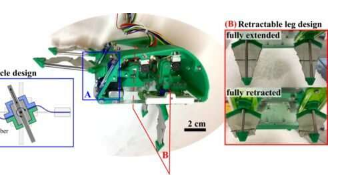
为了克服这一挑战并创造一个垂直腿的挖洞机,研究人员将机器人的腿设计为具有各向异性的力响应,这意味着它们在一个方向上比另一个方向承受更大的力。就像游泳者一样,这个机器人的柔软织物腿在力量冲程期间会扩大以承受很大的力,但在回程冲程期间会折叠和缩回。
“最近在为颗粒介质创建各向异性腿方面取得了一些进展,但这是它们第一次在自由挖洞机器人上成功实施,”特里尔斯说。
研究人员还必须设计一种方法来防止沙粒进入机器人的机构并卡住它们。他们再次从太平洋鼹鼠身上寻找灵感。
“我们创造了一种角质层,类似于在鼹鼠身上发现的关节膜,”特里尔斯说。“这是一种柔软、有弹性的材料,可以在关节的开口处排列,以防止谷物进入内部,但仍允许自由移动。”
学分:加州大学伯克利分校
Treers指出,虽然机器人已经掌握了陆地、太空和海洋等环境,但它们并没有在地下取得重大进展。例如,很少有机器人能像EMBUR那样在自重下自行挖洞。
能够探索地下环境的机器人可用于各种行业和研究领域。应用包括测量潜在农业场地的土壤质量、岩土工程、海洋数据收集以及建筑和挖掘。此外,它们还可以用作海上交通工具或太空漫游车的小型可展开锚,以允许机器人之间的团队合作。
EMBUR还可能进一步加深我们对其他难以在地下观察和研究的穴居动物的科学认识。“机器人物理模型,或像EMBUR这样的机器人原型,可以成为帮助生物学家更好地了解这些动物的生物力学的工具,”Treers说。
为了设计EMBUR的支腿,Stuart和Treers与合著者、综合生物学、电气工程和计算机科学教授RobertFull以及博士BenjaminMcInroe合作。生物物理学研究生小组的学生,在实验室观察和分析鼹鼠蟹。他们很快意识到,这种动物的五对腿可以分成两组,它们以相反的方向相互扫动。他们还注意到了一种插入、扫掠和收回的模式,后者似乎减少了回击时的阻力。然后他们试图在机器人的腿设计中重现这两个特征。
接下来,研究人员使用物理模型来估计腿上的力,以帮助指导他们实施机器人。
“我们使用了一种称为阻力理论[RFT]的建模技术来模拟腿部在其扫掠轨迹中所经历的力,”Treers说。“RFT帮助我们了解了能够实现最成功挖洞的机器人几何形状和行为。”
通过EMBUR,伯克利的研究人员表明,在适当的条件下,在干燥的介质中可以进行垂直腿挖洞。他们认为这是朝着创建一个可以在更广泛的条件和基质类型下挖洞的系统迈出的第一步,比如在真正的海滩上。
“我们计划改进设计,以便进行更深入的挖掘和探索更好的建模方法,例如DEM[离散元方法],以帮助预测机器人行为,”Treers说。“最终,我希望这个机器人能够像动物一样在真实的海滩环境中挖掘,并在跑步、游泳和挖掘之间切换。”
标签: