麻省理工学院CSAIL的AI系统让佩戴者可以用二头肌控制机器人
如果你能用二头肌和肱三头肌控制机器人怎么办?麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究人员在一篇新发表的论文和随附的博客文章中提出了这个问题。他们的答案是一个系统 - RoboRaise--使人类协调者能够通过移动他们的手臂肌肉来执行机器任务。
这项工作定于本周在加拿大蒙特利尔举行的国际机器人与自动化大会上展出。
“我们用机器人提升物体的方法旨在直观,类似于你如何与另一个人举起物品 - 粗略地复制彼此的动作,同时推断出有用的调整。关键的见解是使用非语言线索来编码如何协调的指令,例如提升一点或更低,“研究生和主要作者Joseph DelPreto在一份声明中说道。
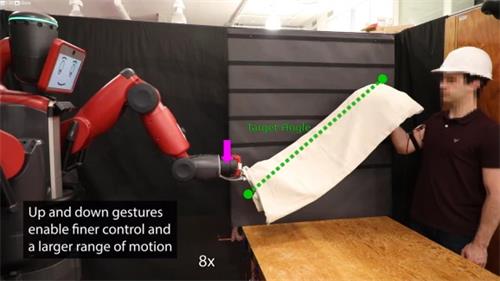
为此,DelPreto及其同事的项目 - 建立在现有系统的基础上,让用户通过脑电波和手势纠正机器人错误 - 包含监测肌肉活动的二头肌和三头肌肌电图(EMG)传感器,以及解析检测到的神经元的算法 - 肌肉射击。稍微拉紧或放松手臂会使团队的Baxter人形机器人上下移动,同时向上或向下做手势会使机器人移动得更远或保持姿势。
该团队指出,由于手势检测AI系统是根据以前用户的数据进行训练的,因此每次使用时只需要“最小校准”。新用户几次紧张和放松手臂,将重量提升到几个高度,他们很高兴。“使用肌肉信号进行交流几乎使机器人成为你自己的延伸,你可以流畅地控制,”DelProto说。
在三个实验过程中 - 一个是机器人静止不动,另一个是机器人响应手势而不是抬起物体,第三个是机器人和佩戴者将物体一起抬起 - 研究人员发现了视觉反馈。机器人提高了实现高度的准确性。在为用户执行装配任务的单独测试中,机器人能够将刚性和柔性物体提升到基座上。
该团队通过监测不同传感器类型的额外肌肉,留出未来的工作,提高系统的自由度。他们已经制作了一个版本,它使用二头肌和三头肌水平来告诉机器人一个物体被保持多么僵硬,他们说这可以使机器人能够流畅地拖动物体或者将物体拉紧。